
前言
1.8 相比 1.7的话,主要有以下改变。
- 数组+链表的形式改为数组+链表+红黑树的形式,提高了遍历效率
- 去除
Segment + HashEntry + Unsafe的实现,改为Synchronized + CAS + Node + Unsafe的实现,其实 Node 和 HashEntry 的内容一样,但是HashEntry是一个内部类。用 Synchronized + CAS 代替 Segment ,这样锁的粒度更小了,并且不是每次都要加锁了,CAS尝试失败了在加锁。 - put()方法中 初始化数组大小时,1.8不用加锁,因为用了个 sizeCtl 变量,将这个变量置为-1,就表明table正在初始化。
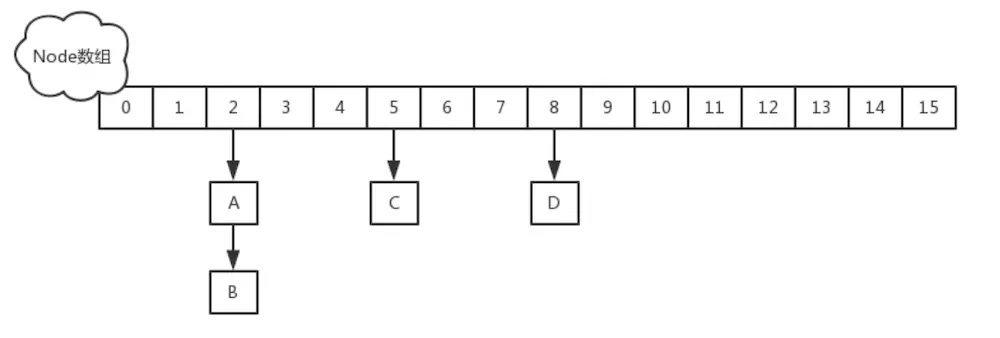
数据结构
ConcurrentHashMap做到了线程安全,其并发性通过CAS+synchronized锁来实现
ConcurrentHashMap底层和Hashmap一样通过数组+链表+红黑树的方式实现。
需知
初始默认容量为 16
最大容量 1<<30
负载因子 0.75f
链表转为红黑树阈值 8
红黑树转为链表阈值 6
sizeCtl:
- 默认为0,用来控制table的初始化和扩容操作
- -1 代表table正在初始化
- -N 取-N对应的二进制的低16位数值为M,此时有M-1个线程进行扩容
- 如果table未初始化,表示table需要初始化的大小。
- 如果table初始化完成,表示table的容量,默认是table大小的0.75倍
扩容节点的 hash 值
1
2
3
4static final int MOVED = -1; // 表示该节点正在处理中
static final int TREEBIN = -2; // 表示该节点是树的根节点
static final int RESERVED = -3; // 暂时保留
static final int HASH_BITS = 0x7fffffff; // 正常节点的hash值可用的位数
Node是ConcurrentHashMap中存放key、value以及key的hash值的数据结构:
1 | static class Node implements Map.Entry { |
当链表转化成红黑树时,用TreeNode存储对象:
1 | static final class TreeNode extends Node { |
在数组中,转变为红黑树后存放的不是TreeNode对象,而是TreeBin对象,TreeBin就是封装TreeNode的容器
1 | static final class TreeBin extends Node { |
ForwardingNode:在扩容时才会出现的特殊节点,其 key,value,hash 全部为 null。并拥有 nextTable 指针引用新的 table 数组。
1 | static final class ForwardingNode<K,V> extends Node<K,V> { |
hash
1 | static final int HASH_BITS = 0x7fffffff; // usable bits of normal node hash |
定位
1 | int index = (n - 1) & hash // n为bucket的个数 |
tabAt
1 | static final <K,V> Node<K,V> tabAt(Node<K,V>[] tab, int i) { |
采用 Unsafe.getObjectVolatie() 来获取,而不是直接用table[index]的原因跟ConcurrentHashMap的弱一致性有关。在java内存模型中,我们已经知道每个线程都有一个工作内存,里面存储着table的副本,虽然table是volatile修饰的,但不能保证线程每次都拿到table中的最新元素,Unsafe.getObjectVolatile 可以直接获取指定内存的数据,保证了每次拿到数据都是最新的。
casTabAt
cas在指定的位置设置元素
1 | static final <K,V> boolean casTabAt(Node<K,V>[] tab, int i, |
setTabAt
该方法用来设置 table 数组中索引为 i 的元素
1 | static final <K,V> void setTabAt(Node<K,V>[] tab, int i, Node<K,V> v) { |
为了保证线程安全,一般在锁方法内部执行。
初始化
ConcurrentHashMap的构造方法都没有实际对table进行初始化,对table的初始化会放在put时。防止不必要的扩容,影响效率。
1 | private final Node[] initTable() { |
扩容
在扩容过程中,依然支持并发更新操作;也支持并发插入。
- 遍历整个table,当前节点为空,则采用CAS的方式在当前位置放入fwd(特殊的扩容节点,表示已扩容)
- 当前节点已经为fwd(with hash field “MOVED”),则已经有有线程处理完了了,直接跳过 ,这里是控制并发扩容的核心
- 当前节点为链表节点或红黑树,重新计算链表节点的hash值,移动到nextTable相应的位置(构建了一个反序链表和顺序链表,分别放置在i和i+n的位置上)。移动完成后,用Unsafe.putObjectVolatile在tab的原位置赋为为fwd, 表示当前节点已经完成扩容。
addCount
- 当插入结束的时候,会对 size 进行加一。也会进行是否须要扩容的判断。
- 优先使用计数盒子(若是不是空,说明并发了),若是计数盒子是空,使用 baseCount 变量。对其加 X。
- 若是修改 baseCount 失败,使用计数盒子。若是这次修改失败,在另外一个方法死循环插入。
- 检查是否须要扩容。
- 若是 size 大于等于 sizeCtl 阈值,且长度小于 1 << 30,能够扩容成 1 << 30,但不能扩容成 1 << 31。
- 若是已经在扩容,帮助其扩容
- 若是没有在扩容,自行开启扩容,更新 sizeCtl 变量为负数,赋值为标识符高 16 位 + 2。
put
- 根据key定位到table的具体位置。
- 如果当前的数组为空,说明这是第一插入数据,则会对table进行初始化;
- 插入数据,这里分为3中情况:
- 插入位置为空,直接将数据放入table的第一个位置中(CAS);
- 插入位置不为空,并且是一个ForwardingNode(f.hash=MOVED)节点,说明该位置上的链表或红黑树正在进行扩容,然后让当前线程加进去并发扩容,提高效率;
- 插入位置不为空,也不是ForwardingNode节点,若为链表则从第一节点开始组个往下遍历,如果有key的hashCode相等并且值也相等,那么就将该节点的数据替换掉,否则将数据加入到链表末段;若为红黑树,则按红黑树的规则放进相应的位置;(对于链表和红黑树的操作需加SYNC锁)
- 数据插入成功后,判断当前位置上的节点的数量,如果节点数据大于转换红黑树阈值(默认为8),则将链表转换成红黑树,提高get操作的速度;
- 数据量+1,addCount统计数据总量,并判断当前table是否需要扩容;
get
计算hash值,定位到该table索引位置,如果是首节点符合就返回
如果遇到扩容的时候,会调用标志正在扩容节点ForwardingNode的find方法,查找该节点,匹配就返回
以上都不符合的话,就往下遍历节点,匹配就返回,否则最后就返回null
size
在JDK1.8版本中,对于size的计算,在扩容和addCount()方法就已经有处理了,可以注意一下Put函数,里面就有addCount()函数,早就计算好的,然后你size的时候直接给你。
synchronized 锁升级
针对 synchronized 获取锁的方式,JVM 使用了锁升级的优化方式,就是先使用偏向锁优先同一线程然后再次获取锁,如果失败,就升级为 CAS 轻量级锁,如果失败就会短暂自旋,防止线程被系统挂起。最后如果以上都失败就升级为重量级锁。
总结
主要设计上的变化有以下几点:
- 不采用 segment 而采用 node,锁住 node 来实现减小锁粒度。
- 设计了 MOVED 状态 当 resize 的中过程中 线程 2 还在 put 数据,线程 2 会帮助 resize(扩容并发)。
- 使用 3 个 CAS 操作来确保 node 的一些操作的原子性,这种方式代替了锁。
- sizeCtl 的不同值来代表不同含义,起到了控制的作用。
- 采用 synchronized 而不是 ReentrantLock